Engineering / Robotics
VEX Robotics
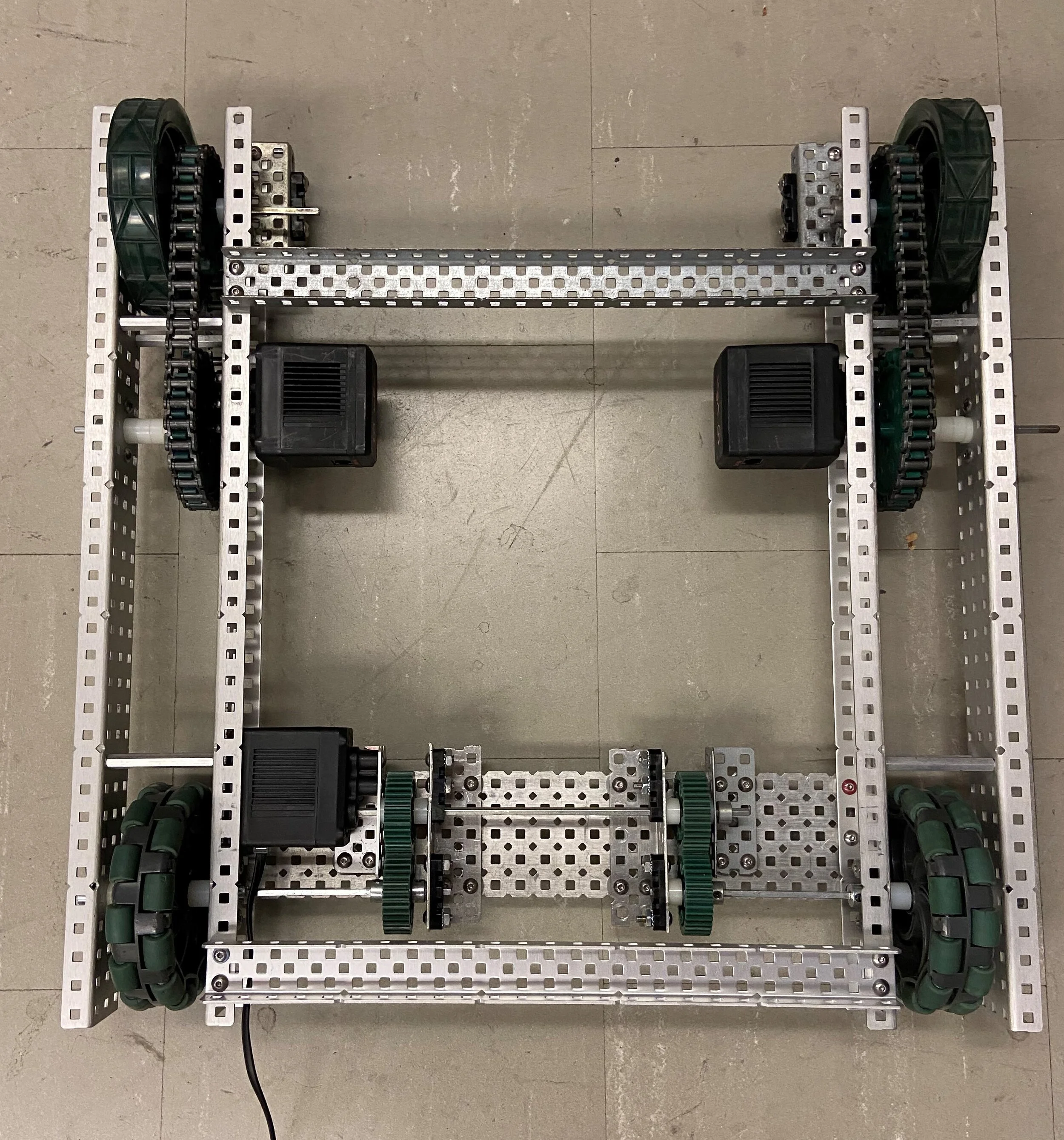
The Robotics and Automation Society teamed up with the Institute of Electrical and Electronics Engineers to fund the competitive robotics team at the University of Houston. The purpose of the competition was to create a robot capable of autonomously and remotely collecting plastic blocks, stacking them, and placing them inside a goal zone. We designed this robot to optimize performance while following strict size, weight, and motor use restrictions. On this team, I functioned as the Mechanical Lead, responsible for supervising the design and construction process. Additionally, I functioned as a communication bridge, facilitate effective communication between the programming team and the mechanical team throughout the design process. For more information about the communication involved in this project select the following link to my Communications Portfolio
Knuckles
The Institute of Electrical and Electronics Engineers worked with the American Society of Mechanical Engineers to recreate a five-degree of freedom assisted robotic manipulator. For this project, I decided to get out of my comfort zone and expand my robotics experience by joining the software sub-team. For this team, we used the MATLAB Robotics Toolbox to control the actuation and positioning of the robotic arm.
For more about my academic and professional accomplishments, select the following link to my Interactive Resume.